
Arduino 시동기 장비, 제어기 보드, 감지기 단위 공장
DIY 교육 풀그릴 로봇은 제조자를 계획합니다
 |
| 원래 장소: | 광동 중국 (본토) |
| 브랜드 이름: | Oky Newstar |
| 모델 번호: | oky3431 |
| 최소 주문 수량: | 한 조각 / 조각 |
|---|---|
| 배달 시간: | 지불 후에 3-5 평일 |
| 지불 조건: | 패 / C 조, D 조 / 디 / 피의 T / T는, 웨스턴 유니온, MoneyGram |
| 공급 능력: | 하루에 천 조각 / 조각 |
| 팩 크기: | 5cm x 4cm x 3cm | 무게: | 50g |
|---|---|---|---|
| 단위: | 이 교체는 한정되지 않습니다 셉니다. | 회전하는 인코더: | 앞으로 자전해서 세어질 수 있습니다 |
| 하이 라이트: | Arduino를 위한 방패,arduino 감지기 장비 |
||
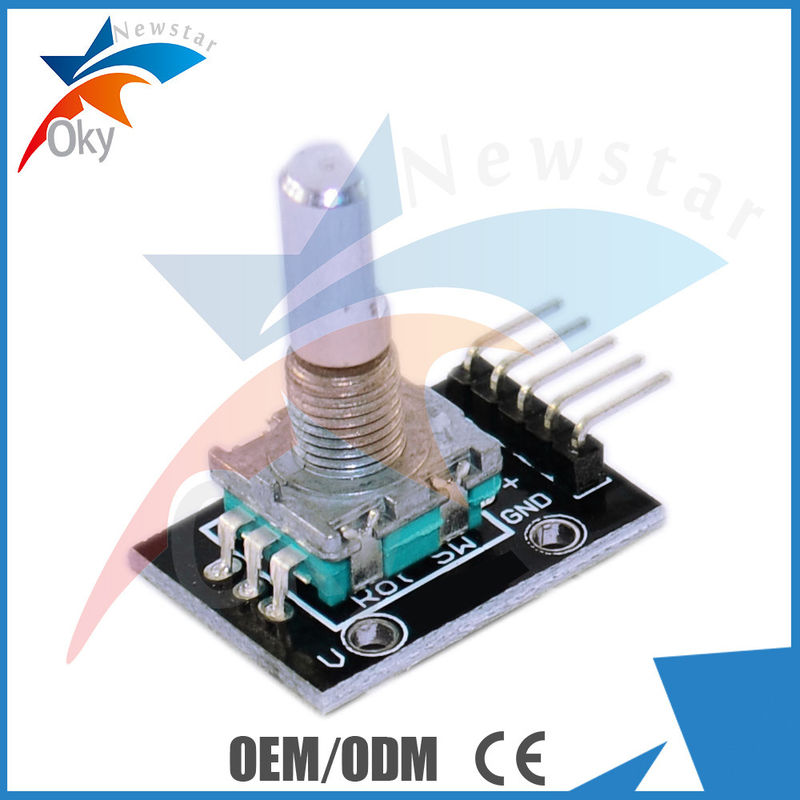
민주당원 부호를 가진 Arduino를 위한 자석 회전하는 인코더 단위
민주당원 부호를 가진 arduino를 위한 회전하는 인코더 단위
명세:
회전하는 인코더는 산출 맥박 빈도의 교체 도중 앞으로와 역 방향을 자전해서 세어질 수 있습니다,
반대 자전 전위차계와는 다른, 이 교체는 한정되지 않습니다 셉니다.
회전하는 인코더에 단추로 0에서 세기 시작합니다 그 그것의 초기 상태에 다시 놓일 수 있습니다.
******************
ARDUINO 시험 부호:
const int interruptA = 0; //개입중단 0 (핀 2)
const int interruptB = 1; //개입중단 1 (핀 3)
int CLK = 2; //PIN2
int DAT = 3; //PIN3
int 단추 = 4; //PIN4
int LED1 = 5; //PIN5
int LED2 = 6; //PIN6
int 조사 = 0;
빈 체제 ()
{
attachInterrupt (interruptA, 내리는 RoteStateChanged);
//AttachInterrupt (interruptB, 떨어지는 buttonState);
pinMode (CLK의 입력);
digitalWrite (2, 높은); //잡아당기기 높은 Restance
pinMode (DAT의 입력);
digitalWrite (3, 높은); //잡아당기기 높은 Restance
pinMode (단추, 입력);
digitalWrite (4, 높은); //잡아당기기 높은 Restance
pinMode (LED1의 산출);
pinMode (LED2의 산출);
Serial.begin (9600);
}
빈 반복 ()
{
만약에 (! (digitalRead (단추)))
{
조사 = 0;
Serial.println (“정지 조사 = 0");
digitalWrite (LED1, 낮은);
digitalWrite (LED2, 낮은);
지연 (2000년);
}
Serial.println (조사);
}
/ / -------------------------------------------
RoteStateChanged 빈 ()//때 CLK 내리는 읽힌 DAT
{
만약에 DAT가 = 높을 앞으로 일 때 (digitalRead (DAT))//
{
조사;
digitalWrite (LED1, 높은);
digitalWrite (LED2, 낮은);
지연 (20);
}
DAT가 = 낮을 BackRote일 때 그밖에//
{
조사 -;
digitalWrite (LED2, 높은);
digitalWrite (LED1, 낮은);
지연 (20);
}
}
공장 그림
![]()
경쟁 이점:
1. 편리하고 & 친절한 소비자 봉사
2. 저가는 공장 공급자에게서 지시합니다
3. 빠른 납품 전 세계에서.
4. 세계적인 기준에 고품질.
5. 1 년 공장 보장
6. 안전 선박 방법과 지불
담당자: Ms. Erica Teng
전화 번호: +8613410424757





